![Sabanto-Horizontal-Orange-on-Transparent-RGB-1080px-05.16.23.png]](https://support.sabantoag.com/hs-fs/hubfs/Sabanto-Horizontal-Orange-on-Transparent-RGB-1080px-05.16.23.png?height=50&name=Sabanto-Horizontal-Orange-on-Transparent-RGB-1080px-05.16.23.png)
Accurate implement measurements are essential for field operations. These values allow the system to understand how the implement behaves and how to use it effectively. The primary uses for these measurements are:
- Coverage Planning: Calculating how much area the implement covers and planning the most efficient path to cover the entire field.
- Path Planning: Ensuring the vehicle drives in the right place to make perfectly straight rows, even on contoured ground.
- Collision Avoidance: Making the vehicle aware of the implement's full dimensions to avoid collisions with obstacles, especially during turns.
The required measurements depend on how the implement is attached. This guide provides extra detail to help you capture them correctly.
Table of contents
Center of Drawbar / 3 Point Hitch Connection to Implement
The distance between the drawbar or 3 point hitch connection point of the vehicle to the implement.
Why it's important: This measurement helps accurately track and control the position of the implement relative to the tractor. This ensures precise path following, safe maneuvering, and effective operation in the field.
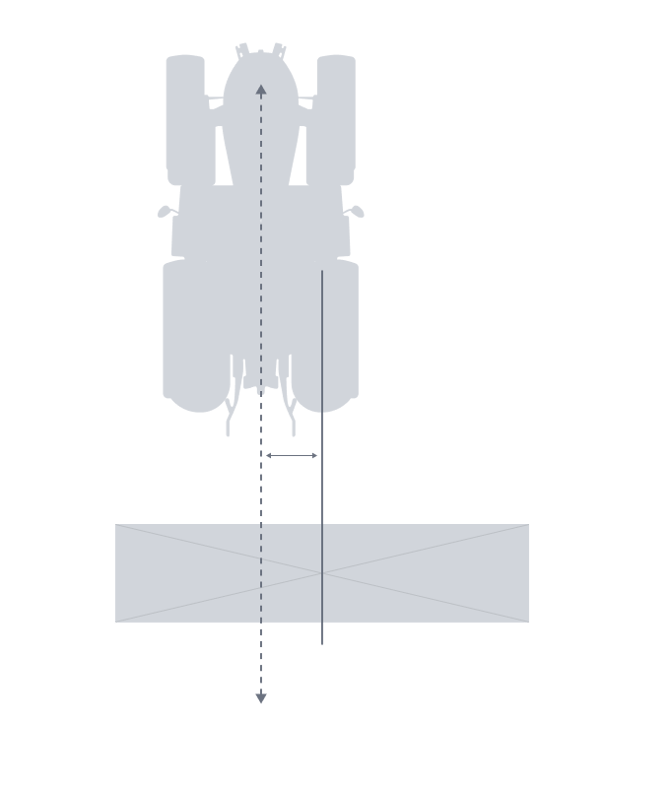
Drawbar / 3 Point Hitch Connection to Center of Work Area
The distance between the drawbar or 3 point hitch connection point of the vehicle and the center of the implement's working area.
Why it's important: This measurement allows the autonomy system to determine the exact location of the implement’s working section relative to the tractor. This ensures accurate coverage, precise path planning, and effective operation during autonomous tasks.
Working Width
The maximum width of the implement's working area (e.g., the width of soil that a planter will seed).
Why it's important: This is one of the most critical measurements for autonomy. It tells the system how much ground the implement covers on each pass. This value is used to calculate the distance between passes (the swath width) to ensure there are no gaps or overlaps in coverage.

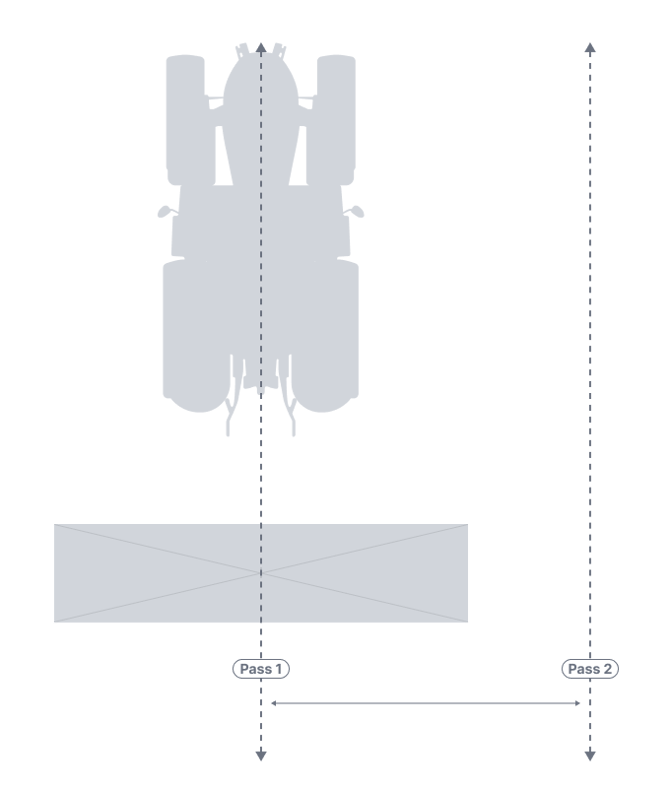
Swath Width
The planned spacing between passes. This is often the same as the Working Width but can be adjusted.
Why it's important: This value directly controls the path planner. By setting a swath width, you define exactly how far apart you want each pass to be, giving you control over overlap or underlap to match your specific operational needs.
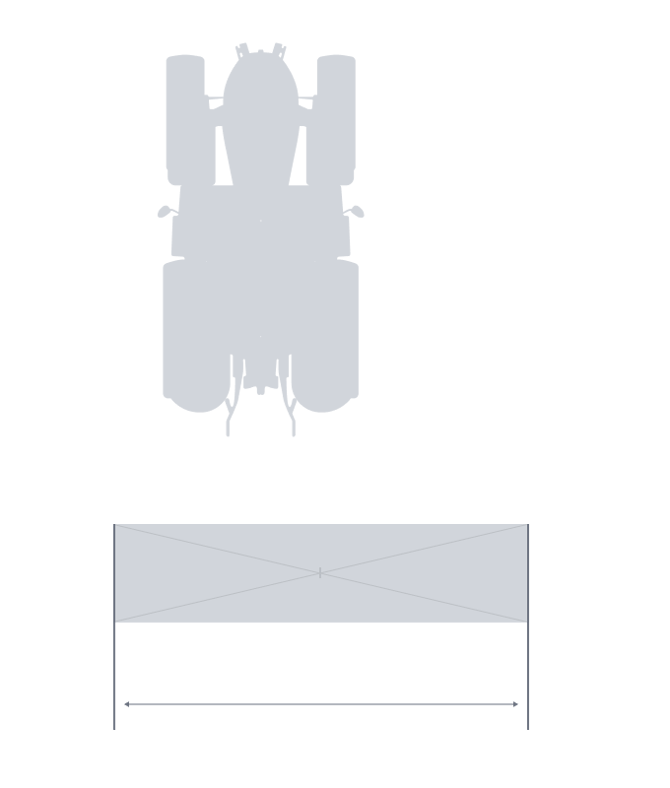
Implement Width
The maximum physical width of the implement when it is in its working position.
Why it's important: This defines the implement's total horizontal footprint. The system uses this to avoid collisions, ensuring that the implement's wings or outer edges don't hit obstacles like fence posts or trees while working in the field.
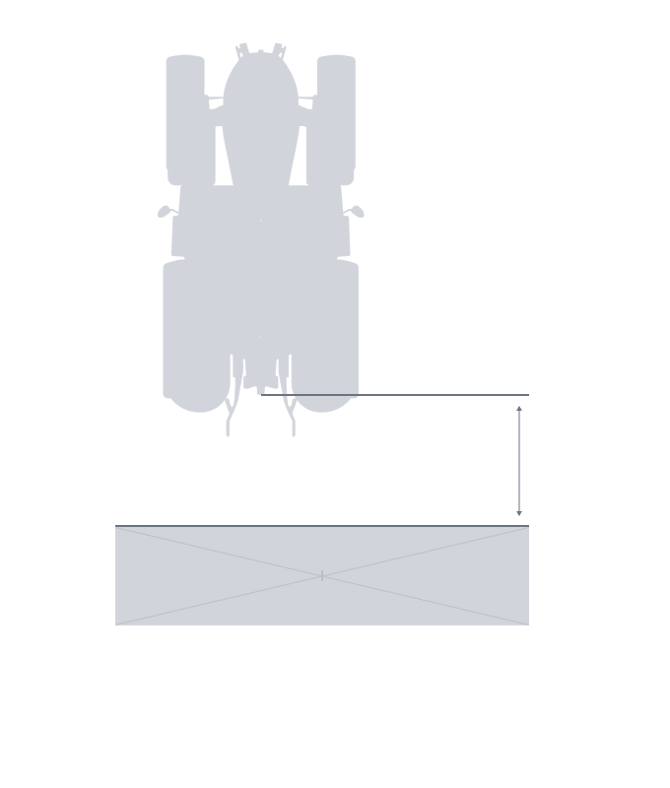
Implement Length
The maximum length of the implement's working area, excluding the attachment point (e.g., from the back of the planter to the front of the seed boxes).
Why it's important: This measurement helps the system create an accurate 3D model and understand the implement's overall size. It's used in visualization and to help the vehicle understand how much space the implement occupies.

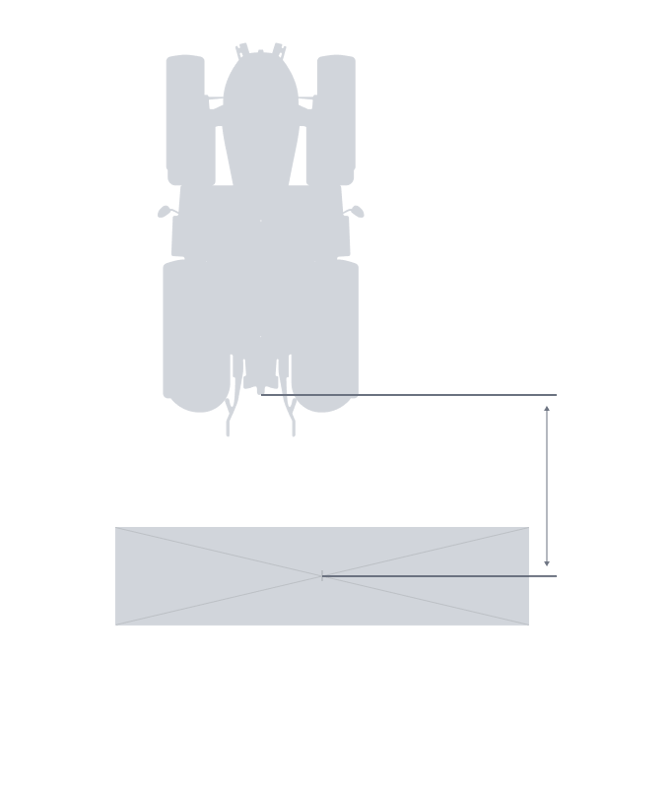
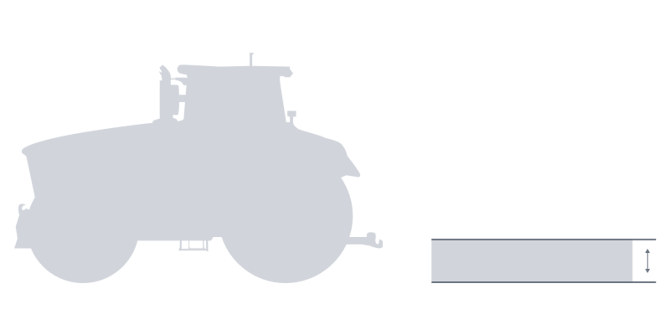
Implement Height
The maximum height of the implement while in the working position.
Why it's important: This is used for visualization and clearance. It helps render an accurate 3D model and can be used to avoid overhead obstacles that might be present in the field.
Left/Right Offset
The offset distance either left (negative) or right (positive) from the vehicle's center axis.
Why it's important: This is for implements that are not perfectly centered behind the vehicle. An accurate offset is critical for path planning, as the system needs to adjust the vehicle's path to ensure the implement is in the correct location, not the vehicle itself.