
Introducing Enhanced Capabilities, Smarter Controls, and Improved Notifications
Quick search
Required Steps to Update to vOS 1.17.0
Expanded Obstacle Detection Width Support for Wide Implements
Remotely Resetting Service Brake Actuator Errors
Configurable Pause for Amber Warning Lamp DTCs
Notification Message Changes - Overhaul
Before upgrading to vOS 1.17 series
This vOS release requires updates to vehicle measurements, implement measurements, and implement configurations. Failure to update these may result in the inability to run missions, or pauses during the mission.
Required Steps to Update to vOS 1.17 series
- Download vOS 1.17.0
- Install vOS 1.17.0
- Update vehicle settings
- Verify vehicle measurements are all filled in
- Add any missing measurements
- Click "Save" after all measurements are entered.
- Update implement settings
- Verify that all implements you will attach to the vehicle with vOS 1.17.0 have measurements filled in
- Add any missing measurements
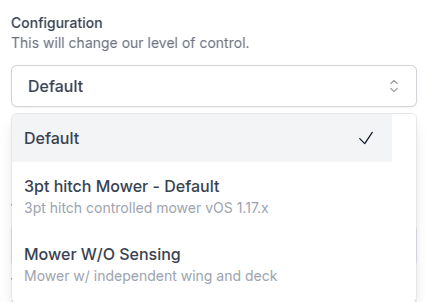
- Update the Implement configuration to the vOS 1.17.0 compatible definition.
- Remote valve implements can use the "Default" or a specific implement configuration, and do not need to use a configuration that specifically says vOS 1.17.x -- i.e., "Mower W/O Sensing"
- Hitch type implements MUST use the new configuration that specifies vOS 1.17.x
- For specific control configurations, ensure the configuration with the description suffix "vOS 1.17.x" is selected.
- For default control, the configuration will have the suffix " - Default"
- The default control option should be chosen when you prefer not to utilize a configuration with customized controls or sequences, or when no alternative configurations are available.
- Click "Save"
Examples of Implement configuration selection |
|
|
|
|

Live Video
With this update, systems can now access live video feeds while their vehicle navigates autonomously. This feature enables you to confirm the safety of resuming navigation in real time. Additionally, you can monitor the surrounding environment where your vehicle operates without any delays. For more details on this feature, please visit here. 
Expanded Obstacle Detection Width Support for Wide Implements
After comprehensive testing and fine-tuning of our obstacle detection sensor settings, the Sabanto autonomy system has been enhanced to accommodate implements up to 30 feet wide, expanding the previous limitation of 28 feet.
Remotely Resetting Service Brake Actuator Errors
The Sabanto autonomy system now features the capability to remotely clear service brake actuator errors, significantly reducing downtime. This enhancement allows you to continue your operations seamlessly, even if the brake enters protect mode and becomes stuck in either the engaged or disengaged position, without the need for a physical visit to the vehicle. Upon encountering a brake issue, you will receive a pause notification stating, "Steward™ detected an error with the service brake," and a "Reset Service Brake" button will be conveniently displayed on the basic tab of the vMC.
If a vehicle is continually entering protect mode, perform a brake calibration [Instructions here]. If the issue persists after calibration, contact you dealer.

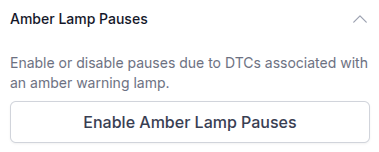
Configurable Pause for Amber Warning Lamp DTCs
The Sabanto autonomy system now allows operators to enable or disable navigation pauses specifically for Amber warning lamp DTCs (Diagnostic Trouble Codes), providing greater control over how these alerts impact operations.
- Enable Amber Lamp Pauses – The Sabanto autonomy system will pause navigation when a DTC associated with an Amber warning lamp is detected, allowing operators time to assess and respond.
- Disable Amber Lamp Pauses – The Sabanto autonomy system will continue operations uninterrupted despite Amber warning DTCs, ensuring workflow remains smooth until servicing.
- If pausing is disabled, operators will receive a notification that the pause was overridden, along with details of the associated Amber warning DTCs.
While the option to ignore amber lamp DTC pauses is available, it is important to address these issues promptly by servicing your vehicle to ensure safe and reliable operation.
This feature is available under the Advanced tab in vMC.
The Sabanto autonomy system detects four lamp statuses, as shown in the chart below, to guide its response. Please refer to the chart for detailed information on each status.
| Lamp Type | Description | What does the Sabanto autonomy system do? | Can it be ignored? |
| Malfunction Indicator lamp | Lamp to indicate when there is an emission related trouble code active. |
Turns off ignition |
No |
| Red Stop Lamp | Lamp to indicate a problem that is severe enough to warrant stopping the vehicle. | Pauses navigation | No |
| Amber warning lamp | Lamp to indicate a problem with the vehicle system but the vehicle does not need to be stopped immediately. | Pauses navigation | Yes |
| Protect lamp | Lamp to indicate a problem with a vehicle system that is most likely not electronic subsystem related. | Notify operator | No |
Cameras Status Badge
Operators can now monitor the status of the cameras through a visual indicator on vMC, which appears as either a yellow or red badge when issues arise. By clicking on the badge, users can access recommended troubleshooting steps. A yellow badge indicates that 1 to 3 cameras are experiencing errors, while a red badge signifies that all 4 cameras are in an error state.
![]()
None Control Type
Operators can select on vMC the control type "None". This control can be used for any implement where operators want to prevent any control of the implement via vMC, or while the vehicle is navigating autonomously. Most notable examples would be a roller, weights, or fuel tanks.

Notification Message Changes - Overhaul
Nearly all notification messages you receive via SMS, vMC, or email have undergone updates. Each message now includes a prefix that indicates whether the system has paused or turned off the ignition, providing clarity on the actions taken by the Sabanto autonomy system. Additionally, many notifications have been rephrased for improved understanding, offering you clearer insights into any issues the system may be experiencing.
| Notification type: | Prefix: |
| vOS turns off the Sabanto autonomy system's ignition | Ignition turned off: |
| vOS pauses autonomous navigation | Navigation paused: |
| The Sabanto autonomy system wants to notify the operator of something. | No prefix |
Resolved Issues
- Failure to boot with unassigned implement: We have resolved an issue where if no implement is assigned to the Sabanto Autonomy System, then the vPFM would fail to completely turn on for autonomous operations. Missions can not be run without an implement.
- Off path at the beginning of the mission: We resolved an issue where Sabanto Autonomy System would error out from a path error when attempting to start a new mission.
- Ignition shutdown when requested to pause: The Sabanto Autonomy System's ignition will no longer be unexpectedly turned off when the vehicle is requested to pause. If this issue is seen, please contact Sabanto Support.
Known Issues
-
Remotely Resetting Service Brake Actuator Errors: In some cases, the service brake error will fail to clear if the autonomy and throttle toggle on the switchbox are in auto.
Workarounds:
- Flip the autonomy and throttle switch on the switchbox to manual, then clear the service brake error.
-
The PTO ‘Engage’ button for the Agrivator is active at the wrong times: When a "Device Reset" is performed with an Agrivator attached, or when the Agrivator is assigned to the vehicle while the 3-PT hitch is raised, the PTO "Engage" button becomes enabled. However, when the implement is lowered, the button becomes grayed out.
Workarounds:
- Assign the Sabanto autonomy system to an aeration mission and click ‘Begin navigation’. The system will then control the implement autonomously as needed.
- Lower the 3-PT hitch and perform a 'Device Reset'.
- Geofence Pauses when Performing the Outermost Headland or Field to Field Transits: At times, the system may pause as a precaution while navigating the outermost headland or during transitions through the tunnel connecting fields on field to field transits. This behavior was identified in the vOS 1.16.x series and, while improvements have been made in vOS 1.17.0, it may still occur.